반도체 회사에서 다양한 유형의 스테핑 모터 IC가 있습니다. 드라이브 IC를 선택할 때 기본 사양 외에 유니폴라/바이폴라 드라이브, 드라이브 전류값 등의 주요 사양이 있습니다.
스테핑 모터 구동 IC에 동작 명령을 내리는 신호의 사양에 대해 설명합니다.
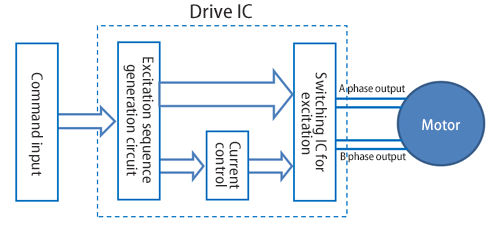
명령 입력 인터페이스
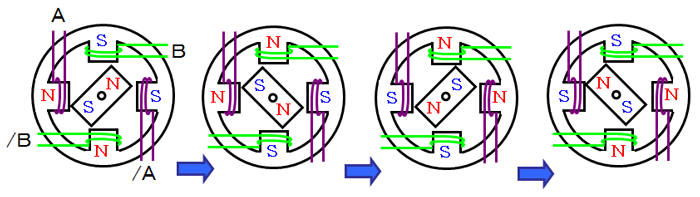
 모터를 구동하기 위해서는 모터 코일의 각 상의 여자 시퀀스를 전환해야 합니다.
모터를 구동하기 위해서는 모터 코일의 각 상의 여자 시퀀스를 전환해야 합니다.
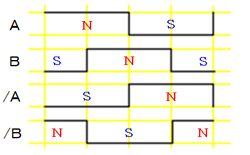
고정된 시퀀스에 따라 각 상의 모터 코일 전류를 전환함으로써 여자(N/S 극성)가 전환되고 모터가 회전합니다.
(아래 그림은 2-2상 여자의 예를 나타냅니다.)
모터를 구동할 때 이 여자 시퀀스를 전환하려면 드라이브 IC에 명령을 입력하십시오.
일반적인 명령 입력 유형
NS. 클럭(=펄스) 입력 방식
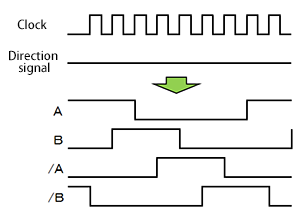 클럭과 방향의 두 가지 신호를 사용하여 모터를 제어할 수 있습니다. 드라이브 IC는 모터를 구동하기 위해 내부 회로에서 클록 및 방향 신호를 각 상의 여기 시퀀스로 변환합니다.
클럭과 방향의 두 가지 신호를 사용하여 모터를 제어할 수 있습니다. 드라이브 IC는 모터를 구동하기 위해 내부 회로에서 클록 및 방향 신호를 각 상의 여기 시퀀스로 변환합니다.
여기 시퀀스는 클록이 변경될 때 전환됩니다. 모터 속도는 클럭 속도에 의해 제어되고, 모터 회전량은 클럭 수에 의해 제어되며, 모터 회전 방향은 방향 신호의 하이/로우에 의해 제어됩니다.
마이크로 스텝 호환 드라이브 IC가 있는 마이크로 스텝 드라이브에서는 여기 시퀀스를 고려하지 않고 클록 및 방향 신호만 사용하여 마이크로 스텝 드라이브를 수행할 수 있습니다.
| 장점 | 클럭과 방향의 두 가지 신호 유형으로 소프트웨어를 쉽게 제어할 수 있습니다. |
|---|---|
| 단점 | 클록 라인 배선을 기판에 걸치게 배선하면 노이즈에 의한 오동작의 가능성이 있습니다. 드라이버의 신호 입력부에 필터를 삽입할 수 있습니다. |
NS. 위상 입력 유형
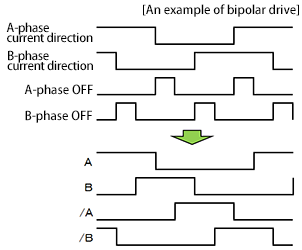 전류의 방향, 여자 ON/OFF, 모터 코일의 각 상의 전류비와 같은 여자 상태를 제어하는 레벨 신호는 모터를 제어하기 위해 필요한 여자 시퀀스를 생성합니다.
전류의 방향, 여자 ON/OFF, 모터 코일의 각 상의 전류비와 같은 여자 상태를 제어하는 레벨 신호는 모터를 제어하기 위해 필요한 여자 시퀀스를 생성합니다.
모터 속도, 회전량, 회전 방향은 여자 시퀀스의 전환 순서와 전환 속도에 의해 제어됩니다.
마이크로 스텝 호환 드라이브 IC로 마이크로 스텝 구동을 하는 경우, 아래 그림의 신호 외에 전류비를 제어하기 위한 여러 신호가 필요합니다.
| 장점 | 여기 시퀀스 상태는 레벨 신호로 제공되기 때문에 노이즈가 발생해도 오작동이 어렵습니다. |
|---|---|
| 단점 | 여자 방식에 따라 지령 신호의 수가 증가합니다. 2-2상 여자: 2선, 1-2상 여자: 4선, W1-2상 여자: 6선. 또한 제어 소프트웨어에서 여기 시퀀스를 생성해야 합니다. |
씨. 직렬 입력 유형
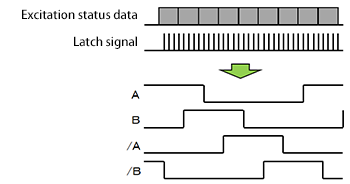 모터를 제어하기 위해 2~3개의 직렬 통신 신호를 이용하여 구동 IC에 위상 입력과 유사한 여자 시퀀스와 같은 여자 상태 데이터를 입력합니다.
모터를 제어하기 위해 2~3개의 직렬 통신 신호를 이용하여 구동 IC에 위상 입력과 유사한 여자 시퀀스와 같은 여자 상태 데이터를 입력합니다.
모터 속도, 회전 속도 및 회전 방향은 여자 시퀀스 전환 순서와 전환 속도에 의해 제어됩니다.
마이크로 스텝 호환 드라이브 IC로 마이크로 스텝 구동을 하면 여자 시퀀스 외에 통신을 통해 전류비 데이터도 입력됩니다.
| 장점 | 여기 시퀀스는 시리얼 통신으로 반복해서 쓰기 때문에 노이즈가 끼거나 라우팅이 길어도 오작동이 어렵습니다. 또한, 명령 신호의 수는 약 2 또는 3개로 적습니다. |
|---|---|
| 단점 | 제어 소프트웨어는 여기 시퀀스를 생성하고 직렬 통신을 수행하기 위해 복잡해야 합니다. 또한 이 유형은 간단한 통신을 사용하기 때문에 매우 빠른 속도로 작동할 수 없습니다. |
* 또한 일부 드라이브 IC에는 제어 기능이 내장되어 있어 직접 작동 명령을 입력할 수 있습니다.
*클럭 입력 신호는 CPU에서 생성되지만 미세한 클럭 주파수 설정이나 원활한 속도 변경이 어려울 수 있습니다.
Nippon Pulse Motor는 이러한 세부 설정을 관리할 수 있는 전용 클럭(=펄스) 생성 LSI, [PCL 시리즈] 및 [PCD 시리즈]를 제공합니다.
[PCD 시리즈]는 또한 위상 입력에 대한 여기 시퀀스(2-2상 및 1-2상)를 생성할 수 있습니다.