높은 토크와 고해상도의 소형 AC 서보 모터

엔코더가 내장 된 소형 고성능 고기능 차세대 서보 모터의 다양한 어플리케이션 옵션을 갖춘 제품군을 제공합니다.
풍모
• 1 arc-sec의 분해능에서 직접 미세 조정을 가능하게하는 내장 고성능 엔코더.
• 고성능 자석 및 고밀도 와인딩 기술을 사용하여 높은 토크를 전달합니다.
• 단일 유닛으로 설계된 모터 및 엔코더로 작은 크기를 제공합니다.
• 고 강성 베어링을 사용하여 큰 하중을 직접 견딜 수 있습니다.
• 중공 축 구조를 지원할 수 있습니다.
• 고객의 요구에 맞게 맞춤형 디자인이 지원됩니다.
라인업
MDS-13 시리즈
 본체 직경 : 13mm
본체 직경 : 13mm
본체 길이 : 26 / 32 / 38mm
최대 토크 : 7 / 15 / 25mN · m
최대 속도 : 3000rpm
MDS / MDH-20 시리즈
 본체 직경 : 21mm
본체 직경 : 21mm
보디 길이 : 32 / 38 / 44mm
최대 토크 : 40 / 90 / 130mN · m
최대 속도 : 3000rpm
최대 해상도 : 72,000P / R, 18 비트
중공 직경 : 2.6mm (MDH 타입)
MDS / MDH-30 시리즈
 본체 직경 : 30mm
본체 직경 : 30mm
보디 길이 : 32 / 38 / 44mm
최대 토크 : 140 / 280 / 420mN · m
최대 속도 : 1000rpm
최대 해상도 : 108,000P / R, 19 비트
중공 직경 : 4mm (MDH 타입)
MDS / MDH / MDH (12) -40 시리즈
 본체 직경 : 40mm
본체 직경 : 40mm
보디 길이 : 32 / 38 / 44mm
최대 토크 : 0.33 / 0.70 / 1.0 N · m
최대 속도 : 450rpm
최대 해상도 : 324,000P / R, 20bit
중공 직경 : 6.12mm (MDH 타입)
MDH-70 시리즈
 본체 직경 : 70mm
본체 직경 : 70mm
보디 길이 : 32 / 38 / 44mm
최대 토크 : 1.0 / 2.2 / 3.1 N · m (DC48V 구동시)
최대 속도 : 200rpm
최대 해상도 : 648,000P / R, 21bit
중공 지름 : 25mm (MDH 타입)
케이스
± 1μm의 반복성을 가진 스칼라 로봇

중공 축이있는 μDD 모터를 사용하는 스칼라 로봇 (정확도 실험을 위해 자체 제작). 중공 축을 통해 케이블을 통과시킴으로써 로봇의 크기가 소형화되었습니다.
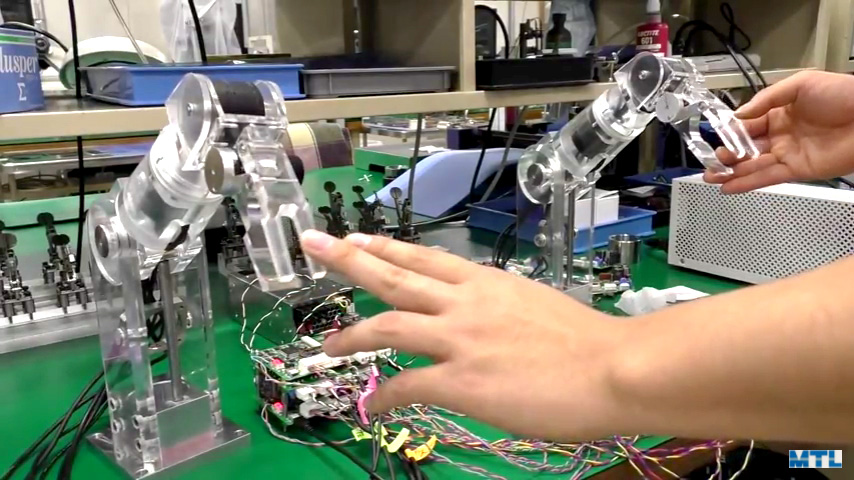
토크 데모 기어리스 모터로 중량을 들어 올립니다.
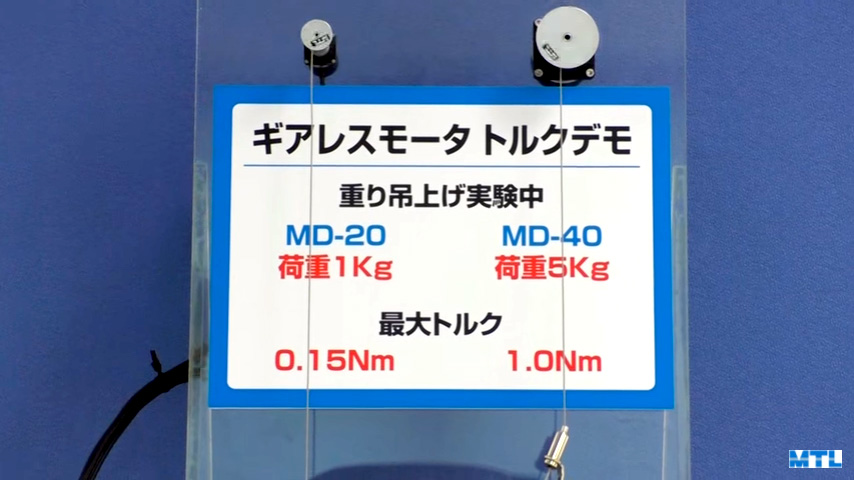
이것은 MD-20과 MD-40을 사용하여 비틀어지는 실험 비디오입니다.
영화는 세부 정보 페이지에서 볼 수 있습니다.